
Space robotics and automation have become fundamental technologies for modern space exploration, enabling missions that would be impossible, impractical, or too dangerous for human crews alone. From robotic arms aboard orbital platforms to autonomous planetary rovers and satellite-servicing spacecraft, these systems extend human capabilities across the Solar System. As agencies and commercial operators pursue lunar bases, Mars expeditions, asteroid mining, and deep-space exploration, advanced robotic systems are increasingly expected to perform construction, maintenance, scientific investigation, and logistics functions with minimal human intervention.
The growing complexity of space missions has accelerated the development of highly specialised robotic platforms capable of operating in extreme environments characterised by vacuum conditions, intense radiation, temperature extremes, communication delays, and reduced gravity.
Core Objectives Of Space Robotics Systems
Space robotics and automation programmes are designed to address several critical operational requirements. These include reducing risks to astronauts, increasing mission efficiency, lowering operational costs, and expanding exploration capabilities beyond human limitations.
Modern robotic systems perform a wide range of tasks, including:
- Orbital assembly and maintenance
- Satellite servicing and refuelling
- Scientific sample collection
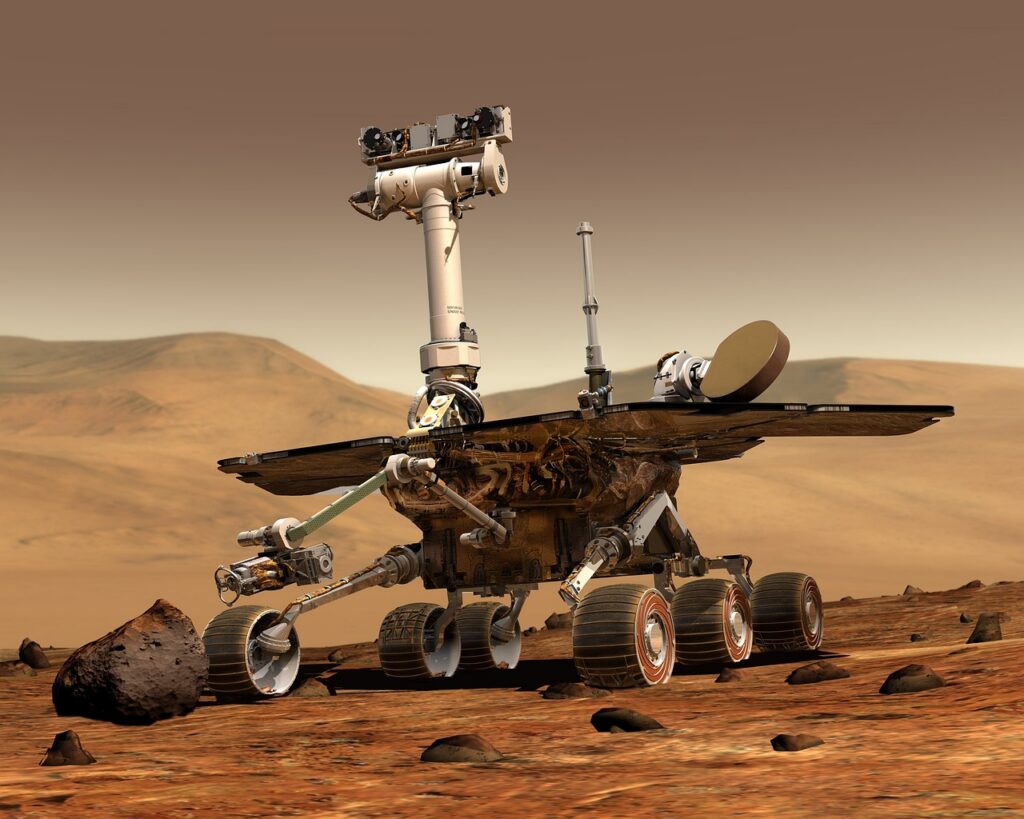
- Planetary surface exploration
- Cargo transportation
- Infrastructure construction
- Autonomous inspection and diagnostics
- Hazardous environment operations
As mission durations increase, space robotics and automation systems are expected to assume a larger share of routine and repetitive operational tasks.
Robotic System Architecture And Design Requirements
Space robotics and automation platforms are typically composed of multiple integrated subsystems designed to operate reliably in harsh extraterrestrial environments.
Structural Components
Space-qualified robotic structures commonly utilise lightweight materials such as titanium alloys, aluminium-lithium composites, and carbon-fibre-reinforced polymers. These materials provide high strength-to-weight ratios while minimising launch mass.
Mobility Systems
Depending on mission objectives, robotic mobility solutions may include:
- Wheeled rover systems
- Tracked locomotion platforms
- Walking robotic mechanisms
- Hopping systems
- Free-flying spacecraft robots
- Multi-jointed robotic arms
Planetary rovers often incorporate six-wheel rocker-bogie suspension systems to maintain stability over uneven terrain.
Power Generation
Power systems vary according to mission duration and operating environment. Common solutions include:
- Deployable solar arrays
- Radioisotope Thermoelectric Generators (RTGs)
- Rechargeable lithium-ion battery systems
- Fuel cell technologies
Long-duration missions operating far from the Sun frequently depend on nuclear-based power generation systems.
Automation Levels And Autonomous Operations
Space robotics and automation increasingly rely on advanced automation due to communication delays and operational complexity. A signal between Earth and Mars can require between 4 and 24 minutes one-way, making real-time remote control impractical.
Teleoperated Systems
Teleoperated robots remain under direct human control and are commonly used in Earth orbit. Examples include robotic manipulators aboard crewed spacecraft and space stations.
Supervisory Control
Under supervisory control architectures, operators define mission objectives while onboard systems execute individual tasks autonomously.
Fully Autonomous Operations
Advanced robotic systems can independently:
- Navigate terrain
- Avoid hazards
- Select scientific targets
- Manage power consumption
- Perform self-diagnostics
- Adapt to environmental conditions
Artificial intelligence and machine learning technologies are increasingly integrated into mission software to support these capabilities.
Sensors, Navigation, And Machine Vision
Reliable autonomous operation requires extensive situational awareness. Space robotic systems utilise multiple sensor technologies to build accurate models of their surroundings.
Navigation Sensors
Common navigation technologies include:
- Inertial Measurement Units (IMUs)
- Star trackers
- Sun sensors
- Laser rangefinders
- LiDAR systems
- Radar imaging systems
Scientific Sensors
Mission-specific payloads often include:
- Spectrometers
- Thermal imaging cameras
- Ground-penetrating radar
- Atmospheric analysers
- Radiation detectors
- Sample acquisition instruments
Machine Vision Systems
Modern machine vision algorithms enable robotic systems to identify terrain features, detect hazards, locate mission targets, and support precision manipulation tasks.
Applications In Lunar And Martian Infrastructure
Future exploration strategies rely heavily on robotic automation before human crews arrive.
Robotic construction systems are being developed to:
- Prepare landing zones
- Build radiation shielding structures
- Assemble habitats
- Deploy power systems
- Manufacture components using local resources
- Maintain infrastructure throughout operational lifecycles
In-situ resource utilisation programmes increasingly depend on autonomous mining and material-processing systems capable of extracting water ice, oxygen, metals, and construction materials from extraterrestrial environments.
These technologies are considered essential for establishing sustainable lunar and Martian settlements.
The Next Generation Of Autonomous Space Systems
Space robotics and automation represent one of the most critical technological foundations for future exploration and commercial development beyond Earth. Advances in artificial intelligence, machine vision, autonomous navigation, robotic manipulation, and distributed robotic networks continue to expand the capabilities of unmanned systems operating in space.
As humanity moves toward permanent lunar operations, Mars exploration, and deeper missions into the Solar System, robotic systems will increasingly serve as explorers, builders, technicians, and scientific partners. Their ability to operate independently in hostile environments makes them indispensable tools for the next era of space exploration and one of the most important disciplines within modern space technology.
Leave a Reply